BalerYou must change this adress according to where you have stored BasicMechanisms File
Define imaginary number and conversion factor from degrees to radians
increment q12 for every 5 degrees
Determination of the crank angle with respect to A0B0
Solve for q13 (and q14 using FourBar2 function for every position
Location of point C uzing complex numbers
Line A0C magnitude and direction
Angle A0A' crank makes with respect to A0C line
Solve for q16 and q15 using FourBar2 function. The four-link loop A0A'DC is solved. Note that the fixed link (A0C) for the four link loop is a variable, whose magnitude is known for everyposition beforehand.
Coordinates of point E for every position
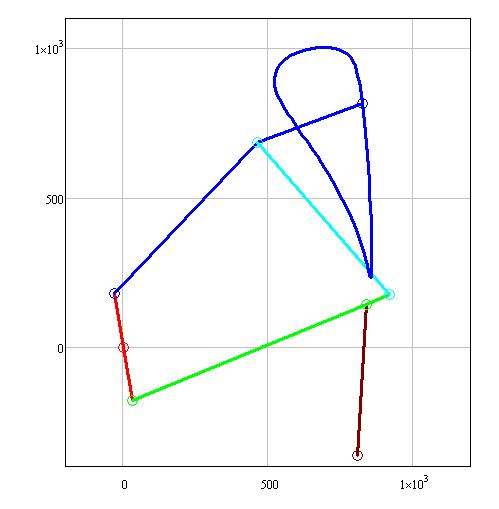
FRAME is a MathCad Variable for animation
Note that the same equations are solved to determine the position of tyhe joints
You can create an avi file by selecting Tools- Animation and selecting frames from 0 to 72
Use the back button to return to Appendix 2